
Sparse Latent Space Policy Search
Kevin Sebastian Luck, Joni Pajarinen, Erik Berger, Ville Kyrki and Heni Ben Amor
Thirtieth AAAI Conference on Artificial Intelligence
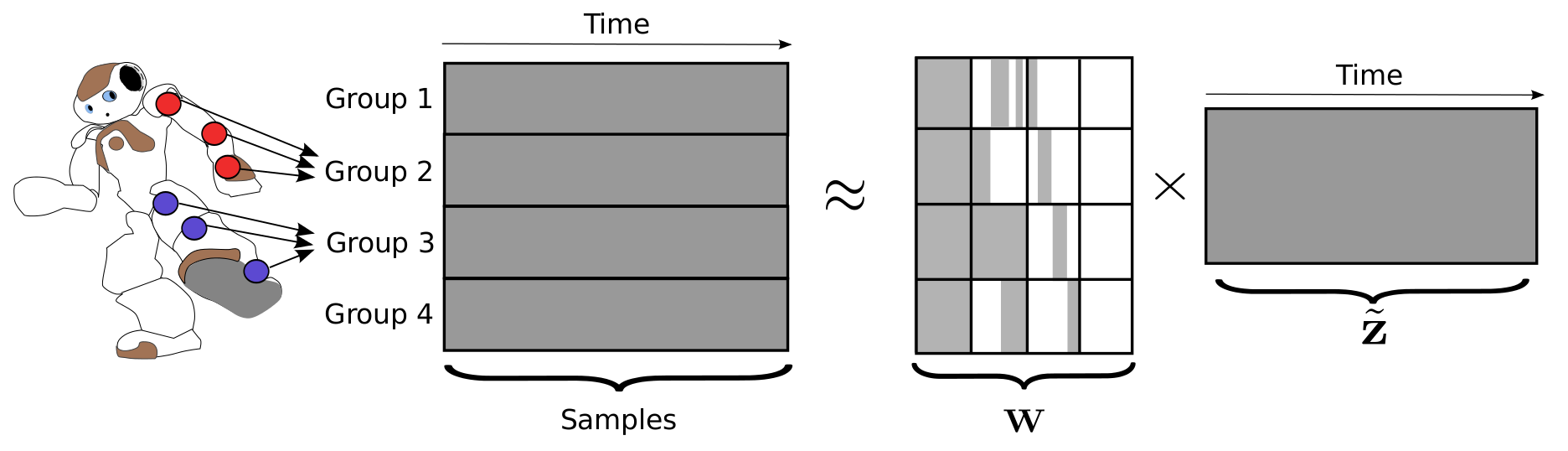
Computational agents often need to learn policies that involve many control variables, e.g., a robot needs to control several joints simultaneously. Learning a policy with a high number of parameters, however, usually requires a large number of training samples. We introduce…. more