Available Student Projects
On this page, we list our available student projects. If you want to volunteer in the lab, want to write a thesis (Honor’s or Masters’s) or do an independent study, feel free to contact us about one of the following projects. We list projects for different stages in your academic career, whether you are currently pursuing an undergrad degree or are looking for a masters thesis, we might have a suitable project for you.
How to apply
If you would like to work on one of the projects, please contact the respective person listed in the project. When contacting us about one of the projects, please email us a formal application including you most recent CV outlining your previous experience and a paragraphs about why you are interested in the particular project.
Undergrad Projects
Voice Agent
In this project, we want to develop an interface that allows a human operator to talk to the robot by translating speech into text as well as allowing the robot to talk to the human by translating text back to speech. Additionally, this interface should be integrated into the Robot Operating System (ROS) and utilize an Android front-end.
This project will give you insights into working with industry standard methods like ROS and give you preliminary insights into robotics research.

Photo by Bence ▲ Boros on Unsplash
- Focus: Mostly software development
- Requirements: Knowledge in Android Development and Python
- Suggested Level: Undergraduate
- Start: Immediately
- Contact: Heni Ben Amor at [email protected]
Masters Projects
Next-Generation Deep Learning Approaches: Application to Robot Navigation
In the project you will implement new neural network architectures and approaches and apply them to learning robot navigation strategies.

- Focus: Deep Learning
- Requirements: Python
- Suggested Level: Masters Project
- Start: Immediately
- Contact: Dr. Heni Ben Amor at [email protected]
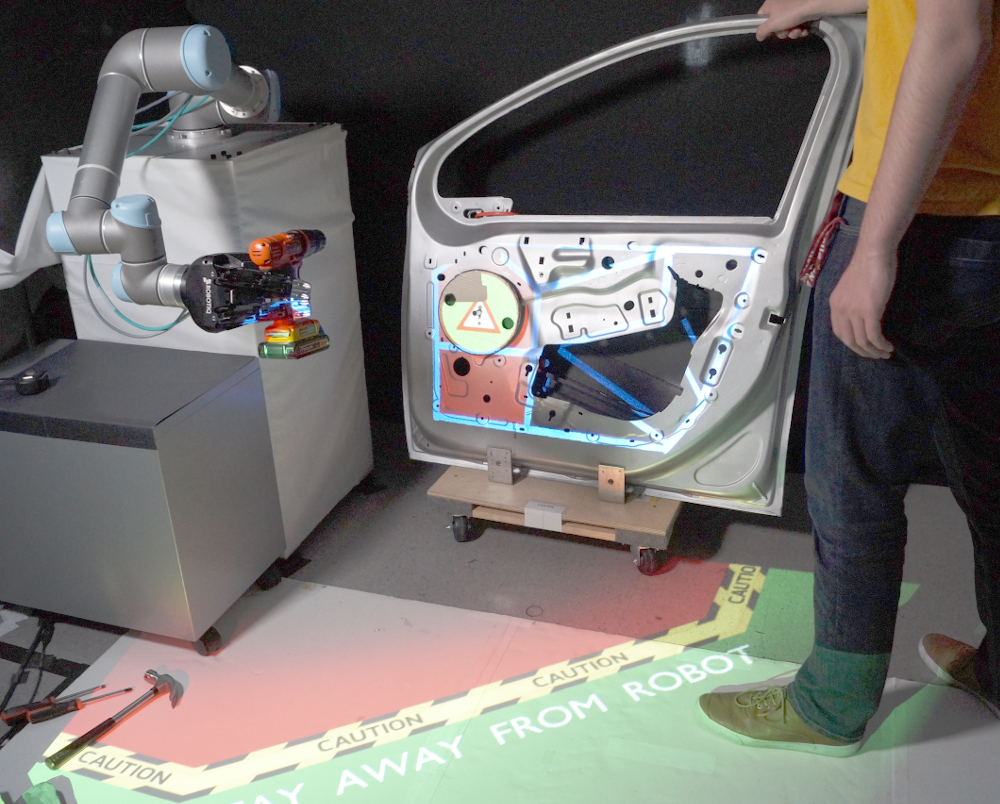
Intention Projection
In this project, you will work at the intersection of robotics and computer graphics to project various information into the environment. This can reach from simple instructions on a planar surface to videos in a dynamic environment.
- Focus: Mostly software development
- Requirements: Python, Computer Vision, ROS
- Suggested Level: Masters Project
- Start: Immediately
- Contact: Heni Ben Amor at [email protected]
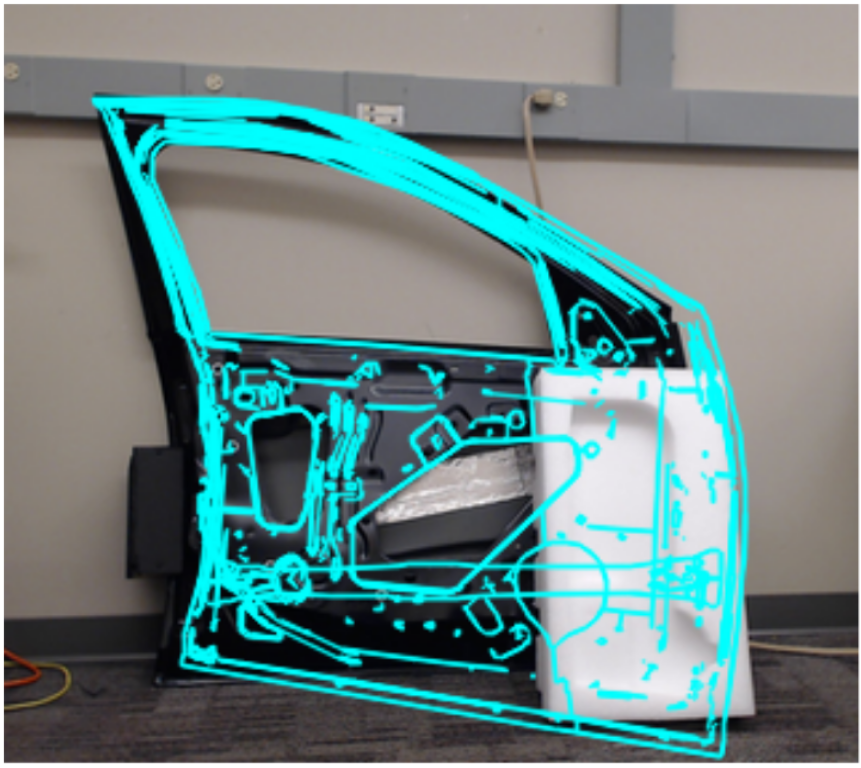
Model-Based Object Tracking
In this project, we want to develop a model-based object tracker that precisely locates objects in the environment based on a 3D model of the desired object. This project will allow you dive into the various concepts behind modern computer vision.
- Focus: Mostly software development
- Requirements: C++, Computer Vision, ROS
- Suggested Level: Masters Project
- Start: Immediately
- Contact: Heni Ben Amor at [email protected]
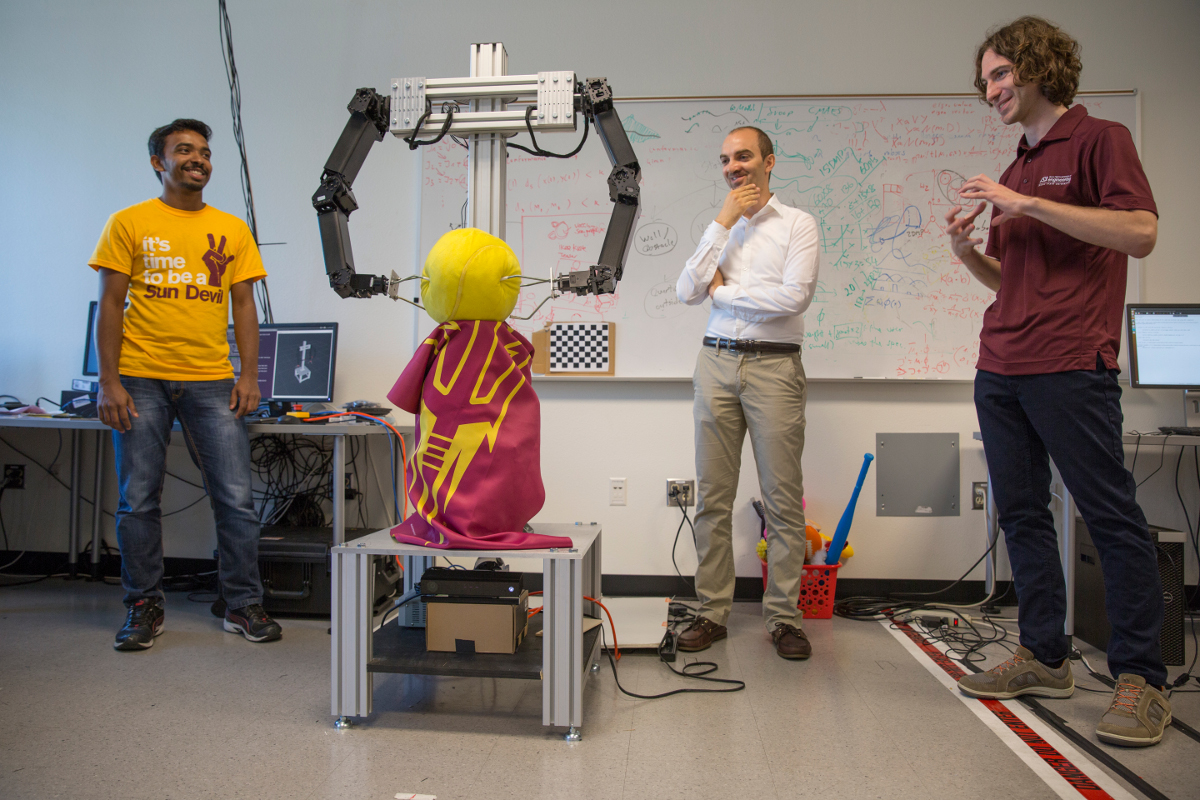
Basketball Throwing Robot
Dynamic tasks are some of the most difficult in robotics, both in terms of amount of data needed and complexity of task. Our lab has developed a number of solutions to these problems and the result is a bi-manual robot capable of autonomously learning to throw a basketball into a hoop through only 300 trials.
This project will use the previous research as a stepping stone for further research. The goal of this project is to have the robot learn to generalize the throwing of the ball into a hoop to multiple locations in an efficient manner.
- Focus: Machine Learning on Motor Primitives
- Requirements: Python
- Suggested Level: Masters Project
- Start: Immediately
- Contact: Geoffrey Clark at [email protected]