Professor

Heni Ben Amor
Assistant Professor and Principal Investigator
Heni Ben Amor, an assistant professor, was previously a research scientist at Georgia Tech’s Institute for Robotics and Intelligent Machines, where he led a project to improve robots for future applications in industrial settings, especially manufacturing. Prior to moving to Georgia Tech, Ben Amor worked with Jan Peters at the Technical University Darmstadt as a postdoctoral scholar. Ben Amor’s research topics focus on artificial intelligence, machine learning, human-robot interaction, robot vision, and automatic motor skill acquisition. He received the highly competitive Daimler-and-Benz Fellowship as well as several best paper awards at major robotics and AI conferences. He also serves on the program committee of various AI and robotics conferences, including AAAI, IJCAI, IROS, and ICRA.
Email : [email protected]
Group Members

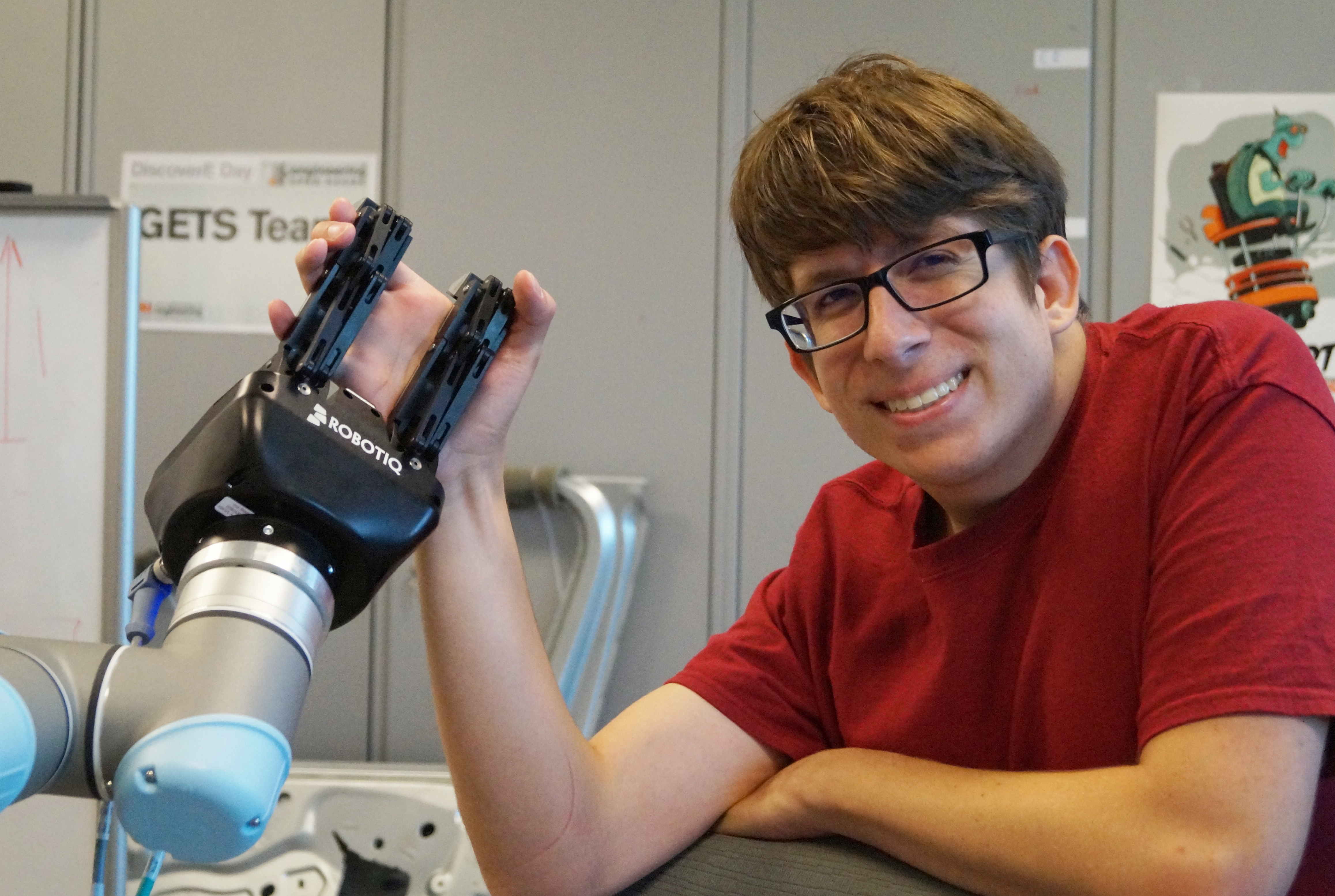
Kevin Sebastian Luck
Research Assistant
Kevin Sebastian Luck is a research assistant at the Interactive Robotics Lab since January 2016. He did his Bachelor’s studies at Technical University Darmstadt, Germany, with a final thesis about dimensionality reduction and policy search, published in the proceedings of IROS 2014. During his Master’s studies at the same institution, he had an exchange year at Aalto University, Finland. There he worked as a student researcher at the Intelligent Robotics Group lead by Ville Kyrki and developed a novel policy search algorithm integrating group factor analysis, published in the proceedings of AAAI 16.His field of interest is Machine Learning for Robotics using stochastic methods.
Email: [email protected]
Joe Campbell
Research Assistant
Joe Campbell is a Computer Science PhD student in the Interactive Robotics Lab, having previously completed a BS in Computer Science and an MS in Computer Engineering at Arizona State University. He has worked on several different projects during this time, including planning algorithms, GPU performance estimation, and autonomous vehicle concurrency modeling frameworks which have been presented at conferences such as CASE, ICCAD, and ITSC. He is the recipient of an NSF EAPSI 2015 fellowship in which he performed research in Singapore relating to traffic light inference for autonomous vehicles as part of his MS thesis. Outside of academia, he has more than six years of experience as a Software and Systems Engineer at companies such as Garmin and Intel.
Email: [email protected]
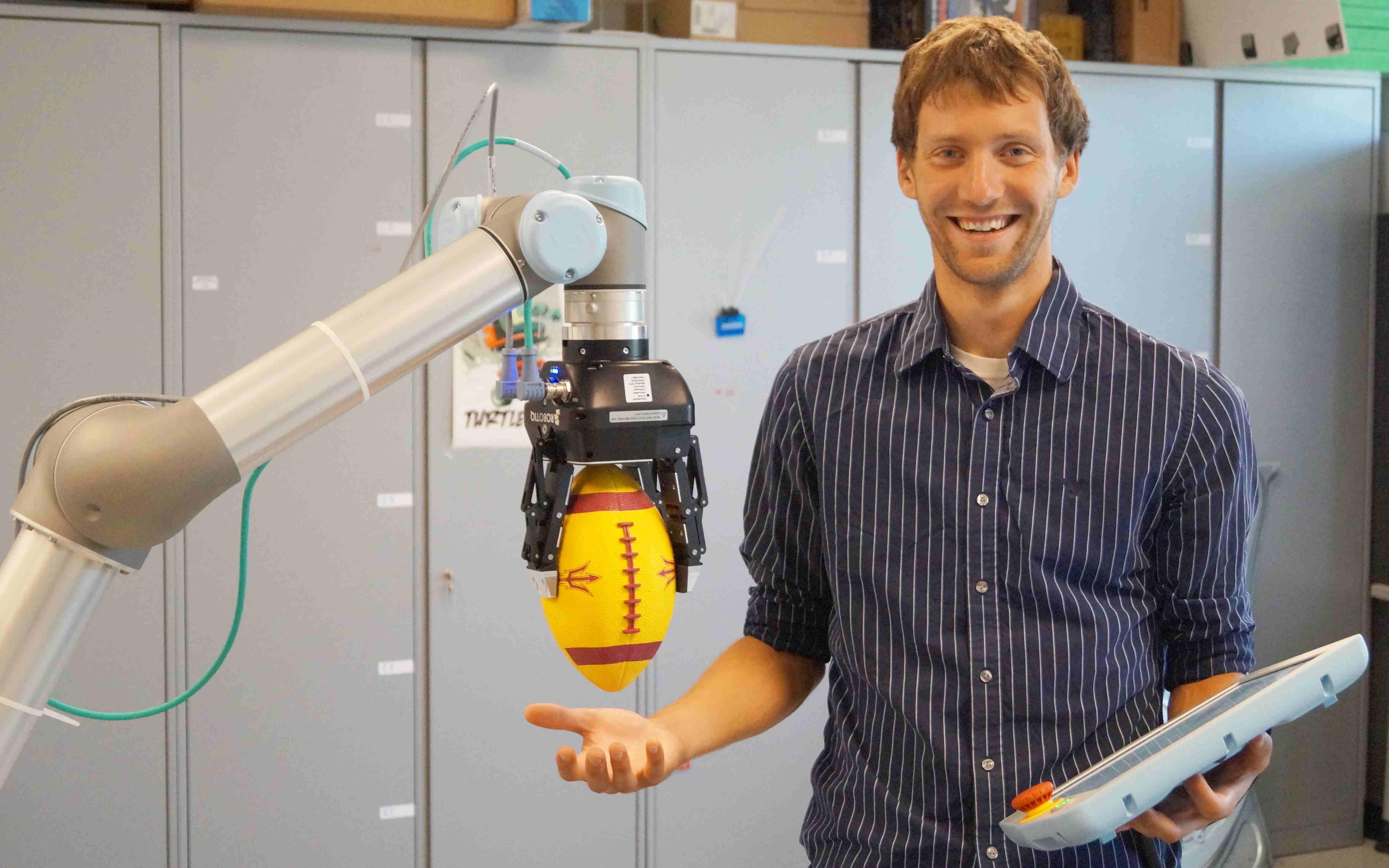
Trevor Barron
Research Assistant
Trevor Barron is a PhD Student in the Computer Science Program at ASU. He received his bachelor’s degree in CS from Colorado College in 2014. Before coming to ASU, Trevor spent two years split between a software position at Lockheed Martin and a teaching assistant position under his undergraduate adviser at Colorado College. Some of his past projects include development of visualization methods for neural networks trained on natural language data and an exploration of potential extensions for a vision-based deep reinforcement learning agent in a 3D environment. He is currently working on a Toyota-funded project to optimize human-robot handover tasks specifically intended for people with disabilities. His research interests are reinforcement learning and neural networks.
Email: [email protected]

Mark Strickland
PhD Student
Mark Strickland is a Ph.D. student in Computer Science at ASU. His work in the Interactive Robotics Lab has focused on construction and programming of biologically-inspired robots and simple gait analysis. Prior to attending ASU, Mark was a partner in the patent litigation practice at the law firm of Perkins Coie. Before his career in the law, Mark worked as a systems programmer for the James Franck Institute at the University of Chicago, and as an aerospace engineer at NASA Langley Research Center in Hampton, Virginia. His academic background includes a B.S. in Aerospace Engineering from the University of Cincinnati and a J.D. from Northwestern University.
Thesis Students
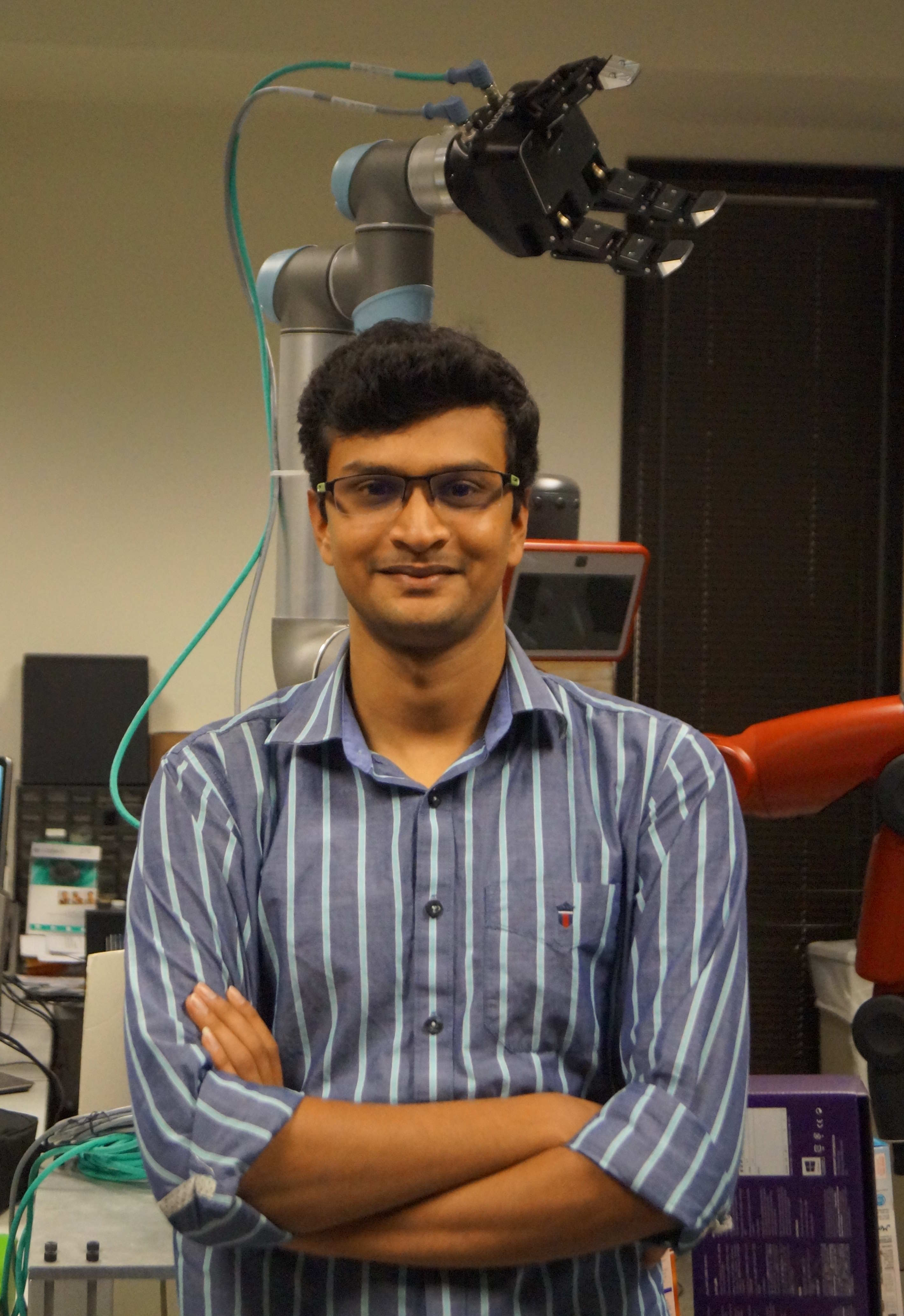
Indranil Sur
Master's Student
Indranil Sur is a Master’s Student in the Computer Engineering Program of ASU. He received his Bachelor’s degree in Electrical Engineering from Indian School of Mines Dhanbad, India in 2010. Prior to joining the Master’s program he worked at Aricent in Tele-Communication domain and at Samsung in Kernel-Stability and Bootloader. Currently he is working on developing Safe Reinforcement Learning methods and studying the nature of safe policy learning in human brain. His research interest are Reinforcement Learning, Policy Learning, Dynamical Motor Primitives.
Ramsundar Kalpagam Ganesan
Master's Student
I am a graduate student in Computer Engineering at Arizona State University, with my research interests focused on the principles and applications of Computer Vision. I completed my Bachelor’s in Electronics and Communication Engineering from Kumaraguru College of Technology (Affiliated to Anna University), Coimbatore, India.
I have nearly 2 years of industrial experience working at Robert Bosch Engineering in Automotive Embedded Software development. Currently I am working on developing a vision based system, which could simultaneously track and project augmented information on objects. My focus on the project is in developing and optimizing a model based (using edges) object tracker for Human-Robot collaborative environments, utilizing the image feed from a monocular camera.

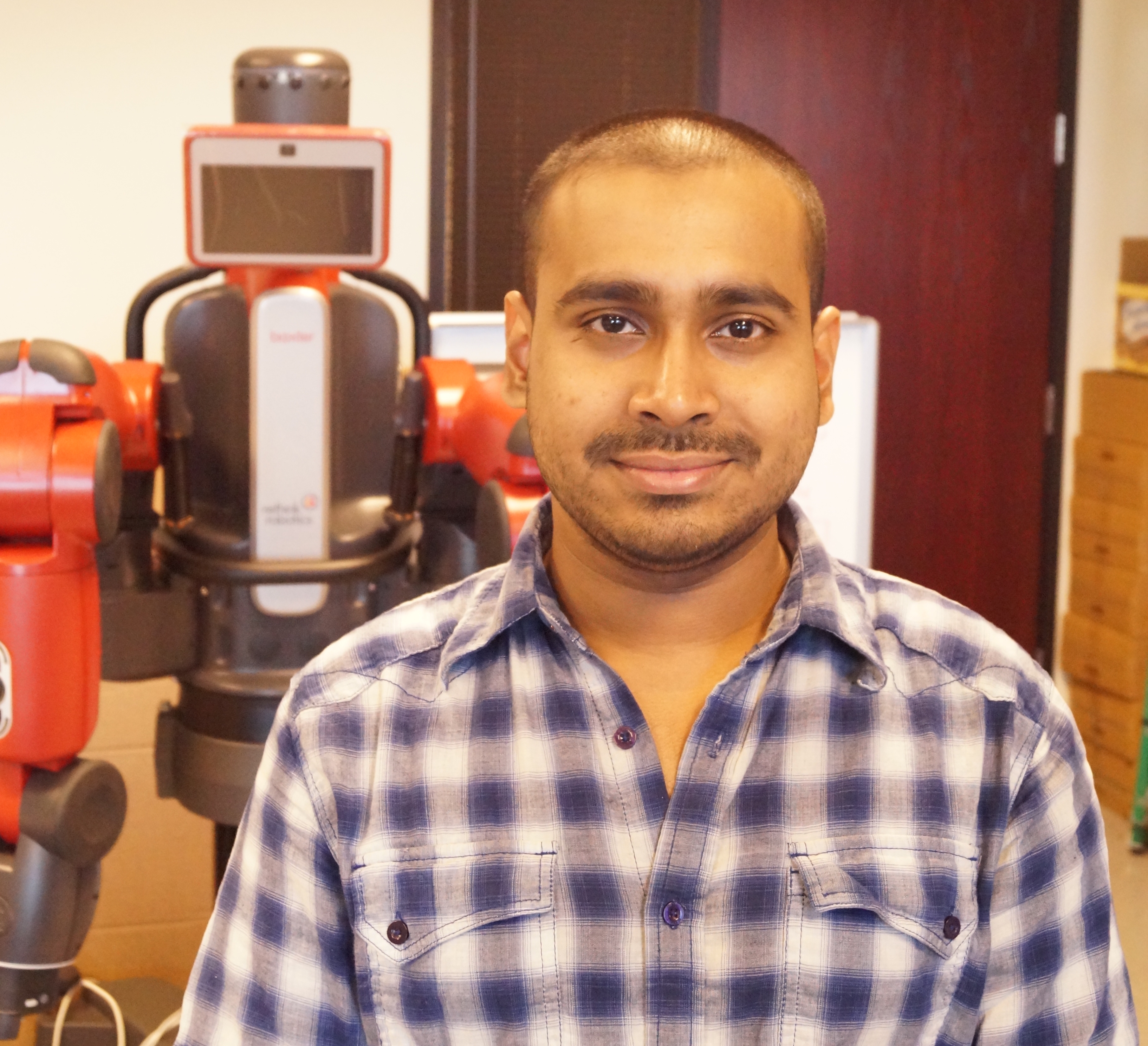
Ashish Kumar Nolastname
Master's Student
Ashish Kumar is a Master’s student at the Arizona State University. He completed his Bachelor’s in Computer Science from Gurukula Kangri Vishwavidyalaya, India, in 2010. He worked with Deloitte Consulting as a Techology Consultant before joining ASU in Fall, 2015. He started working under Dr. Heni Ben Amor a few months ago towards his Master’s thesis. His academic and research interests lie in artificial intelligence, machine learning and intelligent agents. Currently, he is working on Human-Robots Interactions.

Yash Rathore
Master's Student
I am a Master’s student in the Computer Science department at ASU (Fall’15) and received a B.tech. degree in Computer Science from Indian Institute of Technology, Indore (IIT-I).
I started working with Prof Heni Ben Amor a few months back and got introduced into the world of robotics. I am currently working on developing an Interactive environment for humans & robots to work simultaneously and safely. I’m interested in Augmented Reality, 3D Graphics and Algorithms.
In future I’d like to see and work towards creating a world where latest technologies are easily accessible to make human life much more easier.
Students
Garrett Decker
Bachelor's Student
I am a senior undergraduate student in Computer Science at Arizona State University, and hope to pursue a master’s degree once I graduate. I am currently training a neural network to detect collisions so that I can create an autonomously-driven robot. I have an interest in artificial intelligence and its applications to robotics because I believe that this field will become essential to our day to day lives in the future.
Ricky Johnson
Undergraduate Student
Ricky Johnson is a senior undergraduate student in the Computer Systems Engineering student in the Ira A. Fulton School of Engineering. Ricky is currently a NASA Space Grant intern and is constructing and programming a football playing robot that will have the ability to track a football player as they run across the field in order to throw a football to the player. This is Ricky’s first experience in the field of research and he hopes to have a fully functioning robot by the time that he graduates.

Geoffrey Clark
Master's Student
Geoffrey Clark is a Master’s Student in the Electrical Engineering Program in the Ira A. Fulton School of Engineering at ASU. After receiving his Bachelor’s degree in Engineering from ASU, he proceed to work as an Electrical Engineer at SpringActive doing research and development in the area of robotic prosthetics and exoskeleton systems. Currently he is interested in controls and machine learning and its applications in human robot interaction.

Joshua Hsu
Undergraduate Student and FURI Student
Alumni

Nikhil Kalige
Intuitive Surgical
Nikhil did his Master Thesis with us and got a position at Intuitive Surgical.
Who are you?
I am Nikhil, a Master’s student in Computer Engineering (Fall 14).
How did you get interested in (interactive) robotics?
My fascination towards robotics grew as I worked with embedded systems and participating in Lego events.
In which (research) topics, you are interested?
Bi-manual manipulation
What are you currently working on?
I am currently working on developing Bi-manual Learning techniques for a Basketball Playing Robot using Reinforcement learning.
What is your goal for the future?
I would love to work in robotics product development areas.
Website: http://shortcircuits.io
Visitors

David Vogt
Visitor from TU Bergakademie Freiberg
David Vogt is a researcher and PhD student at the Technische University Bergakademie Freiberg. He received his master’s degree in Computer Science in 2011 and is currently working at the Virtual Reality and Multimedia Group Freiberg. His research interests are around human-robot and human-agent interaction. In particular, he is currently focusing on character animation in direct human-agent interactions. David is visiting our lab from February till April.

Philipp Beckerle
Visitor from Technische Universität Darmstadt
Philipp Beckerle received his Dr.-Ing. in mechatronics from Technische Universität Darmstadt, Germany, in 2014. He is chief engineer and deputy head of the Institute for Mechatronic Systems at TU Darmstadt and heads “Human-Mechatronics Synergy” research. His main research topics are human-machine-centered design, elastic actuation, and control of assistive robotic systems. His further interest is in modeling, simulation, control, human factors, biomechanics, fault diagnosis/tolerance as well as human-machine interaction. Philipp is visiting our lab from February till March.

Shuhei Ikemoto
Visitor from Osaka University
Shuhei Ikemoto received his Ph.D. degree in engineering from Osaka University in March 2010. He had been a JSPS Research Fellow from April 2009 to March 2010, an assistant professor in the Department of Multimedia Engineering, Graduate School of Information Science and Technology, Osaka University from April 2010 to June 2014, and a specially appointed assistant professor of The Institute for Academic Initiatives, Osaka University since July 2014 to March 2015. He is now an assistant professor in the Department of System Innovation, Graduate School of Engineering Science, Osaka University since April 2015. His research interests include biologically inspired robots and algorithms, and physical human-robot interaction.